
Ziyi Xu 许子绎
I am an incoming Master’s student in Robotics at EPFL. I completed my undergraduate studies in Robotics Engineering at Zhejiang University, under the Chu Kochen Honors College and the School of Control Science and Engineering.
Previously, I was a research intern at the FAST Lab FAR advised by Prof. Fei Gao. I also conducted summer research at Carnegie Mellon University’s SafeAI Lab, supervised by Prof. Ding Zhao, where I worked closely with Haohong Lin and Shiqi Liu. In addition, I completed my undergraduate thesis under the supervision of Prof. Qiuguo Zhu.
calcualatexzy
ziyi.xu@epfl.ch
calcualatexzy@gmail.com
Ziyi Xu
Biography
I am genuinely passionate about robotics and excited by the growing advancements in machine learning.
My goal is to explore how to merge these two domains by integrating motion planning and control with neural networks. I aspire to bridge the gap between simulation and reality, transforming complex robotic behaviors from captivating animations into real-world robots. Additionally, I am eager to explore the potential for generalizing imitation learning and reinforcement learning, even in small ways, contributing to breakthroughs that push the boundaries of autonomous robotic systems.
I am born in Kunming, Yunnan, and I am a minority of Yi(彝). I love traveling, reading and my family. My favorite book is Norwegian Wood and my favorite dish is small pot rice noodles and stir-fried eggs and tomatoes.
I am currently looking for Master or Phd opportunities starting in Fall 2025.
“If you only read the books that everyone else is reading, you can only think what everyone else is thinking.”
—— Haruki Murakami, Norwegian Wood
News
2024.12.5: Our paper FACT accepted by RA-L 2024!
2024.8.30: Our paper about Active Mutual Observations in Swarms is accepted by IROS 2024!
Publications & Projects
Publications
Query as You Need: Query-centric Diffusion Policy for Generalizable Robotic Assembly
Ziyi Xu*, Haohong Lin*, Shiqi Liu*, and Ding Zhao
Developed a two-stage hierarchical framework with a query-centric diffusion policy for zero-shot execution of long-horizon assembly tasks in robot manipulation, using task-relevant queries to guide the policy.
* indicates equal contribution [Paper]
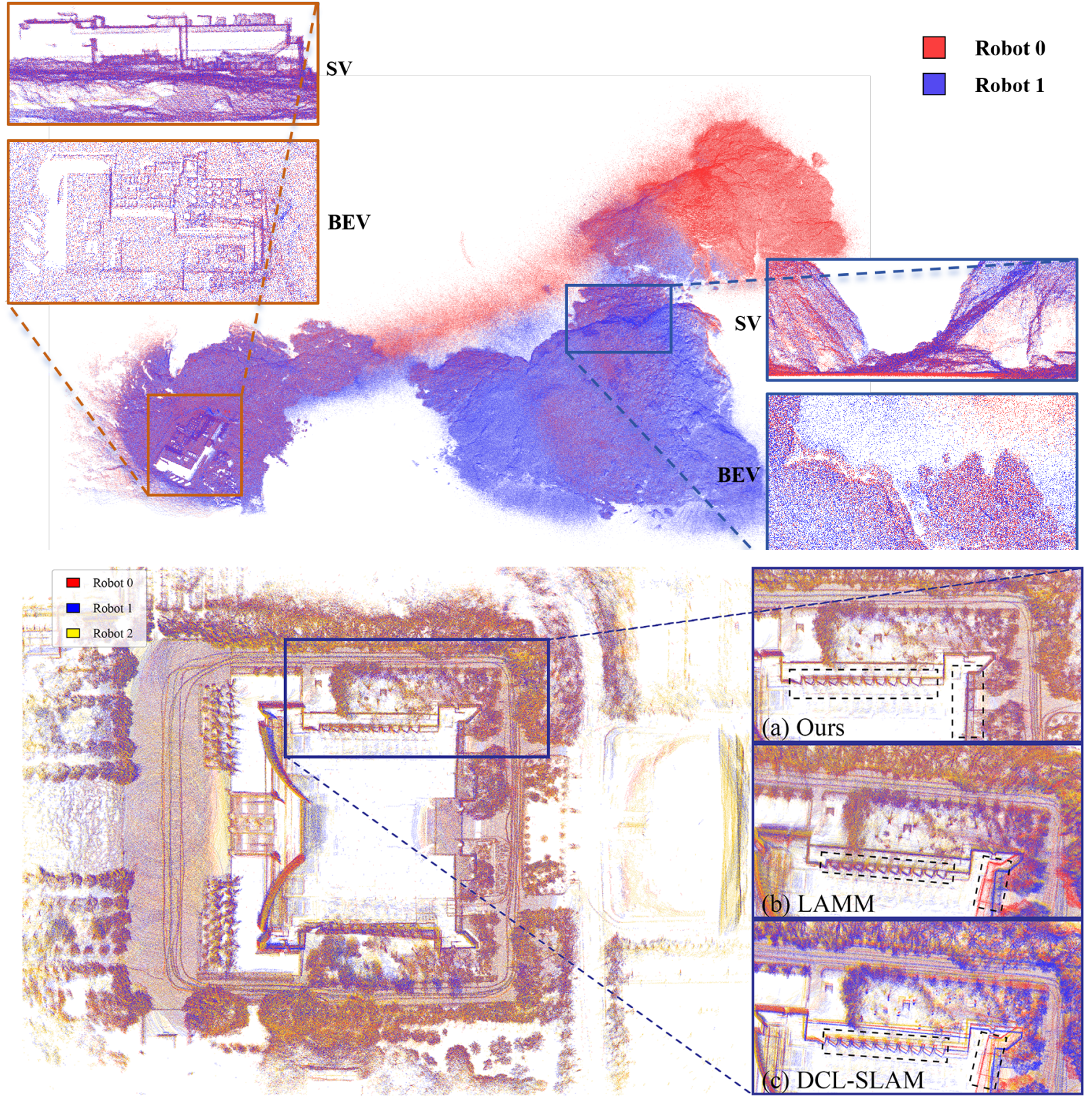
LEMON-Mapping: Loop-Enhanced Large-Scale Multi-Session Point Cloud Merging and Optimization for Globally Consistent Mapping
Lijie Wang, Xiaoyi Zhong, Ziyi Xu, Kaixin Chai, Anke Zhao, Tianyu Zhao, Changjian Jiang, Qianhao Wang, Fei Gao
A scalable multi-session point cloud map merging and optimization framework is designed, which integrates two-step PGO with spatial BA.
In submission to T-RO, 2025. [Paper]
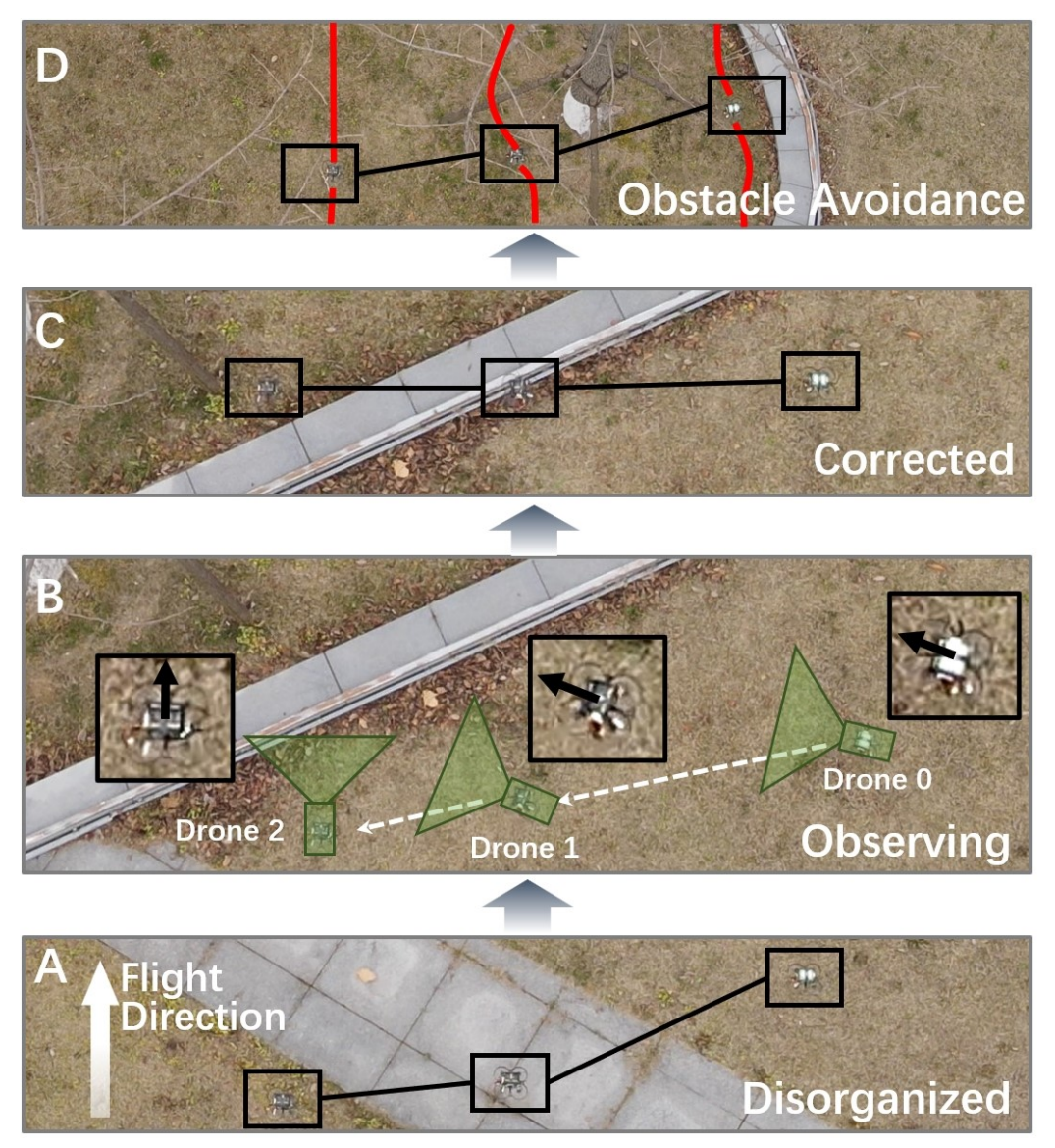
Preserving Relative Localization of FoV-Limited Drone Swarm via Active Mutual Observation
Lianjie Guo*, Zaitian Gongye*, Ziyi Xu, Yingjian Wang, Xin Zhou, Jinni Zhou, and Fei Gao
To balance the demands for FoV-limited swarms by acquiring environment observation as well as mutual observations with a safety guarantee, this paper proposes an active localization correction system, which plans camera orientations via a yaw planner during the flight.
IROS, 2024. * indicates equal contribution [Paper]
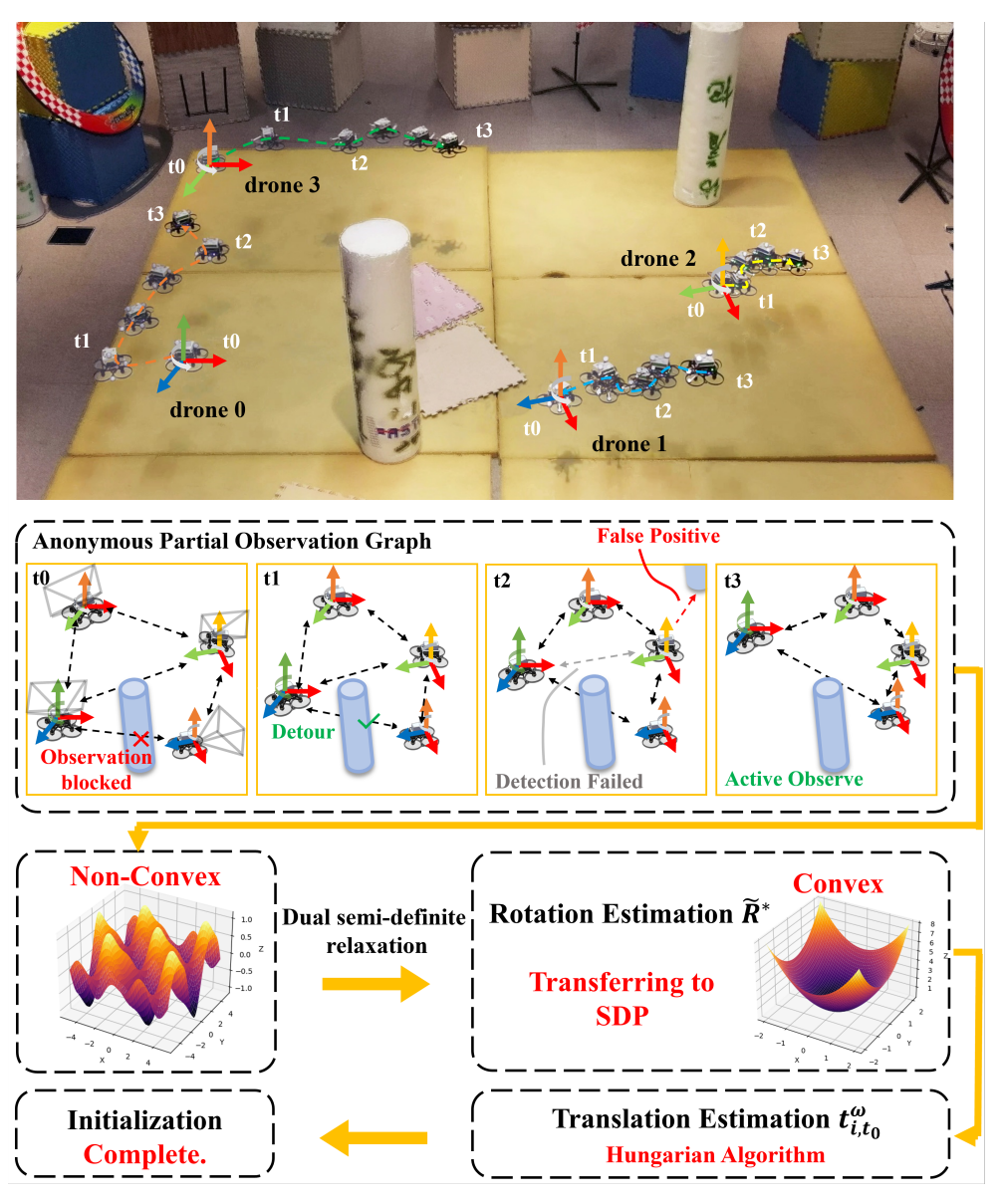
FACT: Fast and Active Coordinate Initialization for Vision-based Drone Swarms
Yuan Li*, Anke Zhao*, Yingjian Wang*, Ziyi Xu, Xin Zhou, Jinni Zhou, Chao Xu, and Fei Gao
Our paper proposes a complete system to recover a swarm’s initial relative pose on platforms with size, weight, and power (SWaP) constraints.
RA-L, 2024. * indicates equal contribution [Paper]
Projects
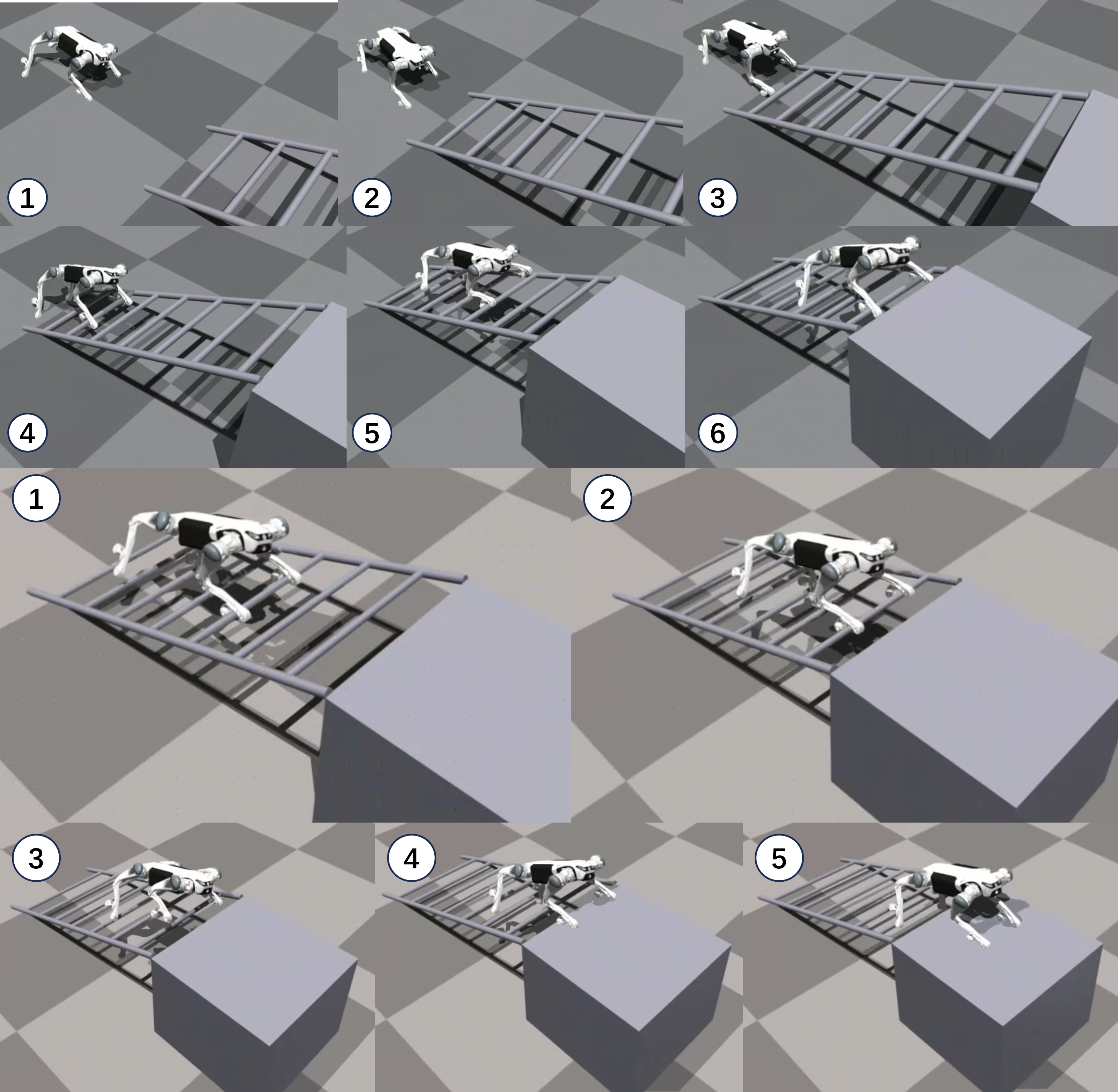
◦ Reinforcement Learning for Ladder-Climbing Quadrupeds
(Advised by Prof. Qiuguo Zhu)
Designed and integrated a custom hook-based foot mechanism to enhance stability during vertical traversal. Developed a reinforcement learning framework enabling quadruped robots (Lite3) to climb various ladder configurations.
ROBOMASTER University AI Challenge(Classic) 2023-2024
National Champion - Anke Zhao, Ziyi Xu, Weiye Zhang, Zaitian Gongye, William Wu
(Advised by Boyu Zhou and Fei Gao)
Teamed up and won an autonomous drone racing nation-wide challenge with our self-built drone.
A full video is HERE.
Real-time 3D Point Cloud Object Detection Model Based on Auto-wheeled Robot Platform
National Student Research Training Program (SRTP) - Ziyi Xu, Zifei Wu, Zhe Yang
We self-designed and developed a real-time object tracking autonomous car from scratch, implemented and compared state-of-the-art 3D-point-cloud-based object detection methods.
Reinforcement Learning for UAV Trajectory Tracking
Course Project: Innovation and Practice in Robotics - Ziyi Xu, Lijie Wang, Liang Wang
We generated a high-quality trajectory library and used PPO to train diverse trajectory tracking. The model was deployed in the real world using domain randomization.
The simulation and real on the left are not the same trajectory.
Life & Social

Zhejiang University Student Robot Association
President of Association(Jun, 2022 - Jun, 2023)
Led an association of over 100 students passionate about robotics. We not only facilitated self-learning and peer teaching to explore cutting-edge developments in the field, but also organized workshops, guest lectures from industry experts, and collaborative robot design projects. Achieved the 2022-2023 Zhejiang University Top10 Students’ Association Award.