|
Hello (Bonjour, 你好!) I'm Ziyi Xu, a first-year M.Sc. student in Robotics with a minor in Data Science at EPFL in Lausanne, Switzerland. I am currently advised by Prof. Sylvain Calinon at the IDIAP Research Institute, where I work on robot manipulation and Learning from Demonstration (LfD). I received my B.E. in Robotics Engineering from Zhejiang University (rank 1/41), where I was part of the Chu Kochen Honors College and the School of Control Science and Engineering. Previously, I was a research intern at the FAST Lab, advised by Prof. Fei Gao, and I also conducted summer research at Carnegie Mellon University's SafeAI Lab under the supervision of Prof. Ding Zhao. Throughout my academic journey, I have also been fortunate to be guided by wonderful mentors, including Haohong Lin and Cem Bilaloglu. ziyi.xu@epfl.ch / calcualatexzy@gmail.com / CV / Google Scholar / GitHub I am currently looking for Summer Internship Opportunities starting from June 2026. |
|
Publications & Projects
Publications
Mapping
|
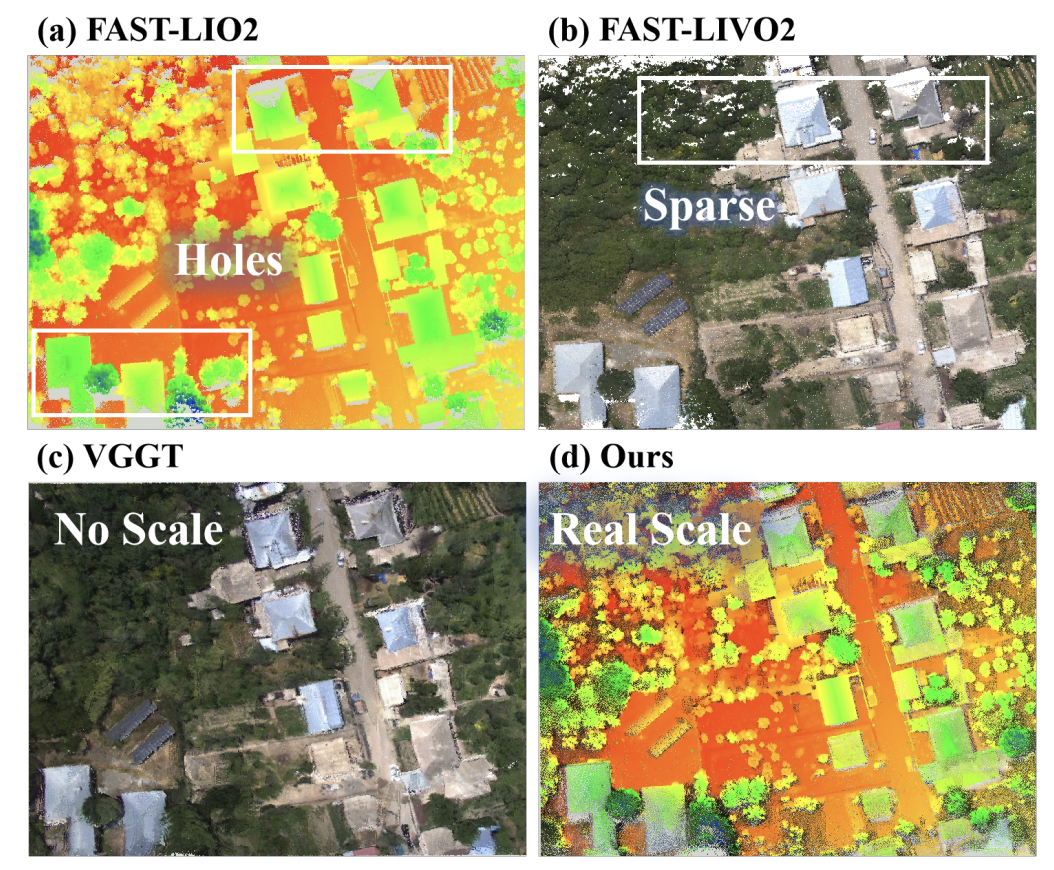
Lijie Wang, Lianjie Guo, Ziyi Xu, Qianhao Wang, Fei Gao, and Xieyuanli Chen We propose LiDAR-VGGT, a novel framework that tightly couples LiDAR inertial odometry with the state-of-the-art VGGT model. RA-L, 2026. [paper] |
|
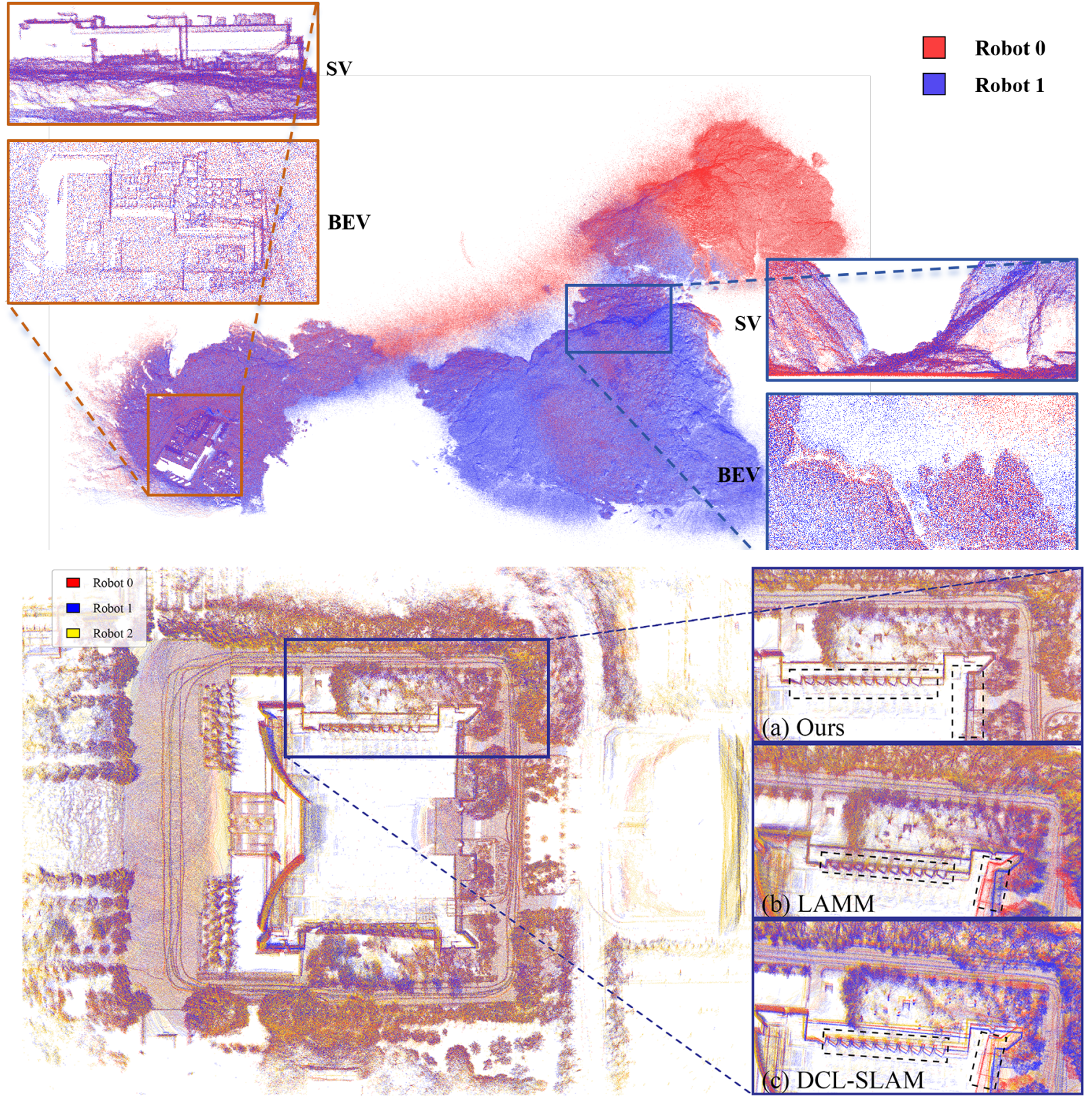
Lijie Wang, Xiaoyi Zhong, Ziyi Xu, Kaixin Chai, Anke Zhao, Tianyu Zhao, Changjian Jiang, Qianhao Wang†, Xieyuanli Chen†, and Fei Gao We propose LEMON-Mapping, a loop-enhanced framework for large-scale, multi-session point cloud fusion and optimization. We re-examine the role of loops in multi-robot mapping and present three key innovations. T-ASE, 2026. [paper] |
Manipulation
|
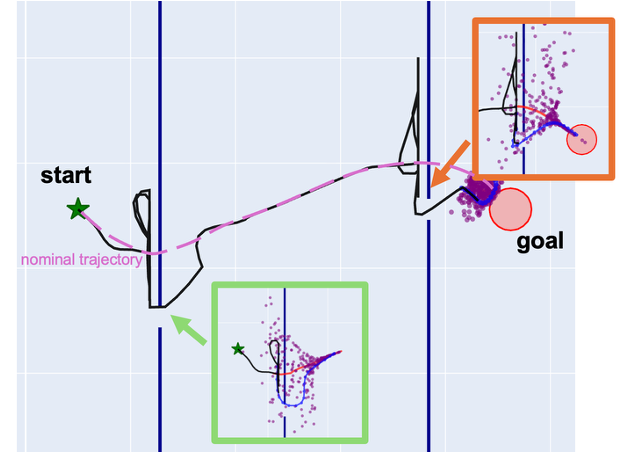
Ziyi Xu*, Cem Bilaloglu*, Yiming Li, and Sylvain Calinon We propose an adaptive ergodic imitation approach that uses demonstration geometry to continuously transition between trajectory tracking and online exploration under deployment mismatch. ICRA Workshop, 2026. (* indicates equal contribution) [paper] |
|
Ziyi Xu*, Haohong Lin*, Shiqi Liu*, and Ding Zhao Developed a two-stage hierarchical framework with a query-centric diffusion policy for zero-shot execution of long-horizon assembly tasks in robot manipulation, using task-relevant queries to guide the policy. (* indicates equal contribution) [paper] |
Drones
|
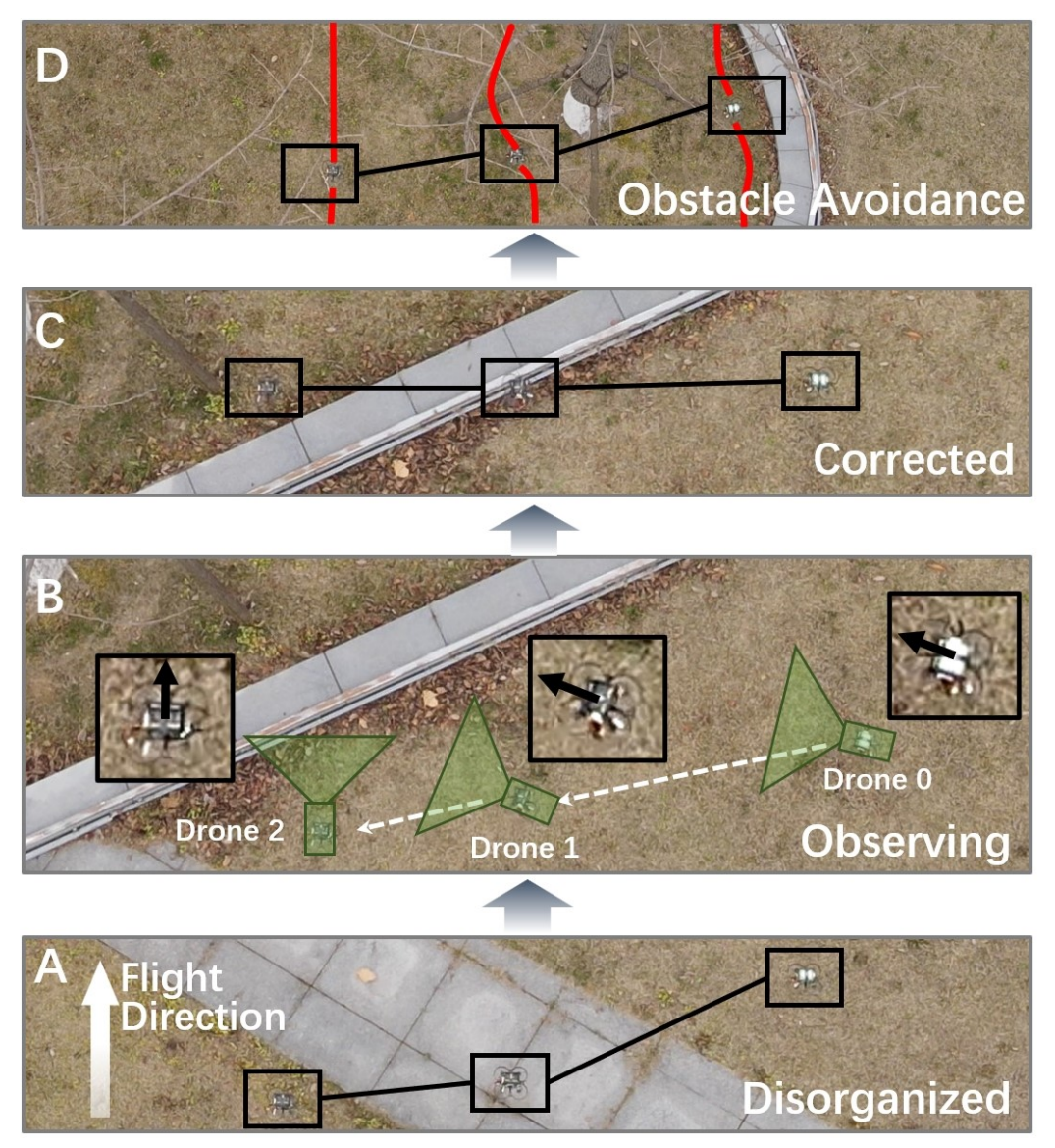
Lianjie Guo*, Zaitian Gongye*, Ziyi Xu, Yingjian Wang, Xin Zhou, Jinni Zhou, and Fei Gao To balance the demands for FoV-limited swarms by acquiring environment observation as well as mutual observations with a safety guarantee, this paper proposes an active localization correction system, which plans camera orientations via a yaw planner during the flight. IROS, 2024. (* indicates equal contribution) [paper] |
|
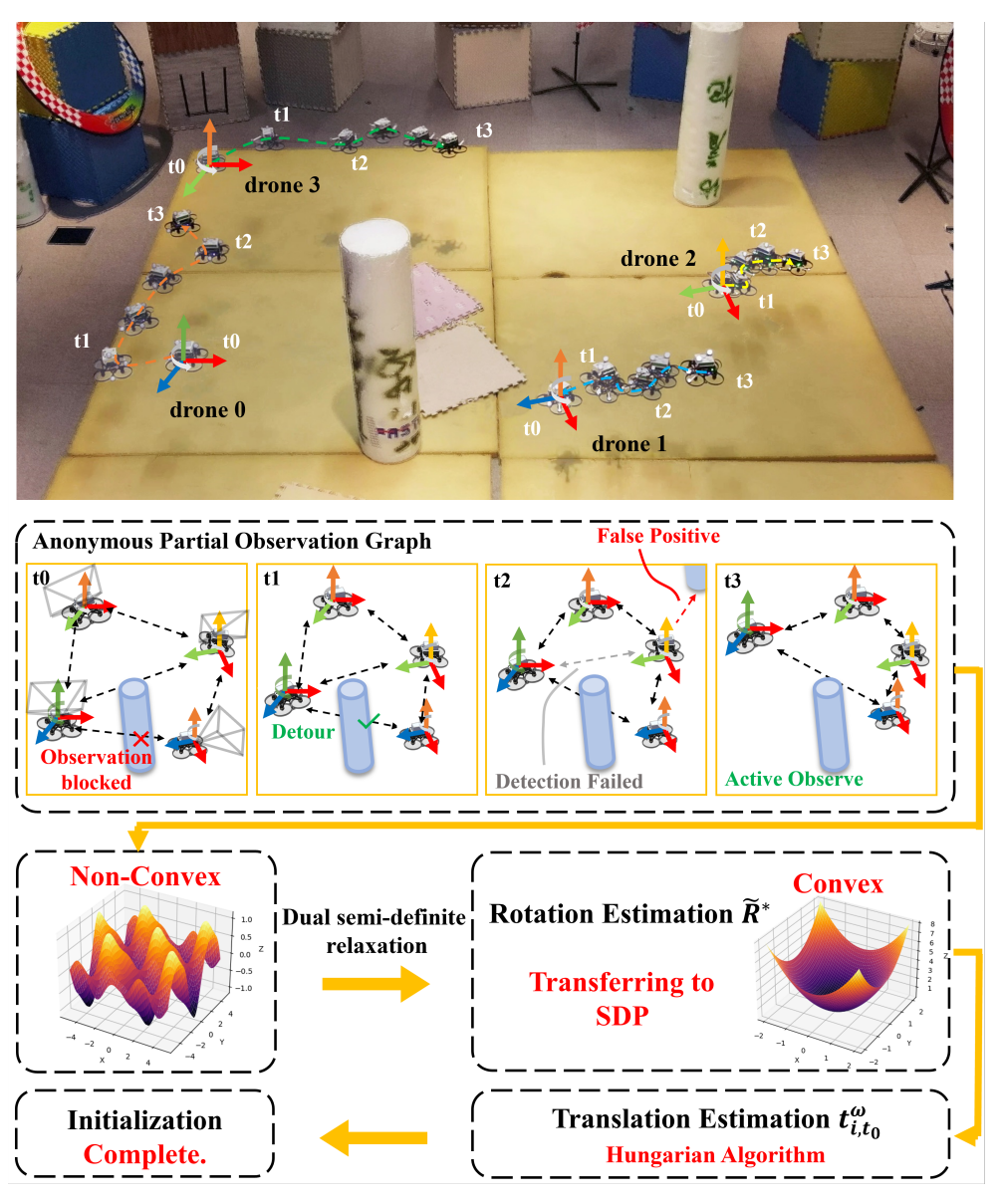
Yuan Li*, Anke Zhao*, Yingjian Wang*, Ziyi Xu, Xin Zhou, Jinni Zhou, Chao Xu, and Fei Gao RA-L, 2024. (* indicates equal contribution) Our paper proposes a complete system to recover a swarm's initial relative pose on platforms with size, weight, and power (SWaP) constraints. [paper] |
Projects
|
National Champion - Anke Zhao, Ziyi Xu, Weiye Zhang, Zaitian Gongye, William Wu Teamed up and won an autonomous drone racing nation-wide challenge with our self-built drone. [video] |
|
National Student Research Training Program (SRTP) - Ziyi Xu, Zifei Wu, Zhe Yang We self-designed and developed a real-time object tracking autonomous car from scratch. |
|
Course Project: Innovation and Practice in Robotics - Ziyi Xu, Lijie Wang, Liang Wang We generated a trajectory library and used PPO to train diverse trajectory tracking policies for real-world deployment. |
